
대한전자공학회
The Institute of Electronics and Information Engineers
|
(사)대한전자공학회 연구회 행사
|
|
*사전등록기간 : ~ 2025. 7. 15.(화) 18시까지
초대의 글
여름학교 개요
여름학교 프로그램 (세부일정)
[ 2025년 7월 18일(금). 중앙대학교 310관(100주년기념관) B501호 ]
* 주최측의 사정으로 프로그램이 일부 변경될 수 있습니다.
여름학교 등록안내
여름학교 등록비 안내
o 등록기간 : ~ 2025년 7월 15일(화) 18시 까지 o 아래 사전등록 클릭 - 사전등록 정보 입력 및 등록비 결제 진행을 하여주시기 바랍니다. o 카드결제가 불가하신 분께서는 계좌시, 아래 계좌정보로 이체하여 주시기 바랍니다. - 입금계좌(영상이해연구회) : o 대한전자공학회 사업자등록증(2025년) 사본 (클릭 다운로드 -PDF) 영수증 및 계산서 발급안내
o 계산서는 온라인에서 신청해 주시기 바랍니다. 카드결제시 계산서 발급은 불가능합니다.
문의처
 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
여름학교 행사장 안내 : 중앙대학교 310관(100주년기념관) B501호
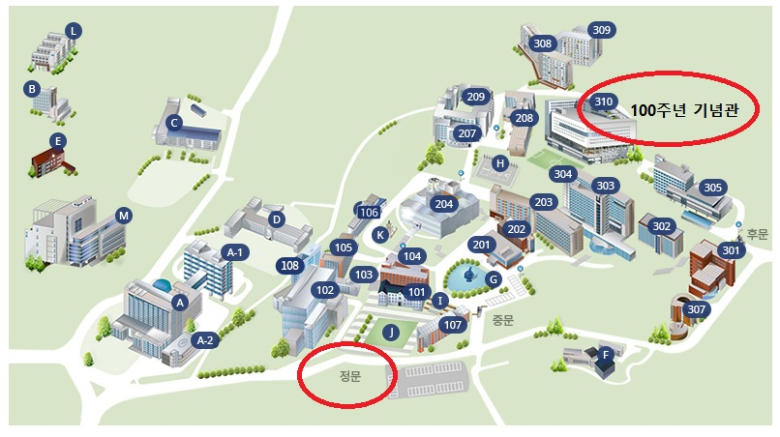
O 지하철
 7호선상도역(중앙대앞) : 5번 출구에서 도보 10분
7호선상도역(중앙대앞) : 5번 출구에서 도보 10분 9호선흑석역(중앙대입구역) : 3, 4번 출구에서 도보 15분
9호선흑석역(중앙대입구역) : 3, 4번 출구에서 도보 15분
일반버스
 지선버스5511(서울대 → 중앙대), 5517(서울대 → 중앙대), 5524(신림8동 → 중앙대), 5536(하안동 → 중앙대), 6411(구로동 → 흑석역)
지선버스5511(서울대 → 중앙대), 5517(서울대 → 중앙대), 5524(신림8동 → 중앙대), 5536(하안동 → 중앙대), 6411(구로동 → 흑석역) 간선버스151(우이동 → 중앙대), 350(송파공영차고지 → 흑석역), 360(송파 → 흑석역), 361(고덕동 → 흑석역), 452(송파 → 중앙대), 640(신월동 → 흑석역), 752(구산사거리 → 흑석역)
간선버스151(우이동 → 중앙대), 350(송파공영차고지 → 흑석역), 360(송파 → 흑석역), 361(고덕동 → 흑석역), 452(송파 → 중앙대), 640(신월동 → 흑석역), 752(구산사거리 → 흑석역) 광역버스9408(분당 → 흑석역)
광역버스9408(분당 → 흑석역) 마을버스동작01(달마사 → 중앙대), 동작10(신동아아파트 → 중앙대)
마을버스동작01(달마사 → 중앙대), 동작10(신동아아파트 → 중앙대) 공항버스6016(인천공항 → 흑석역)
공항버스6016(인천공항 → 흑석역)